






















Client:
The Customer is an Independent/integrated work cells and automation equipment manufacturer in North America.
Why APA?
APA has around 8 years of experience in the design of automation equipment, welding fixtures, assembly line automation, work stations/work cells, and EOAT (End Of Arm Tools).
Scope:
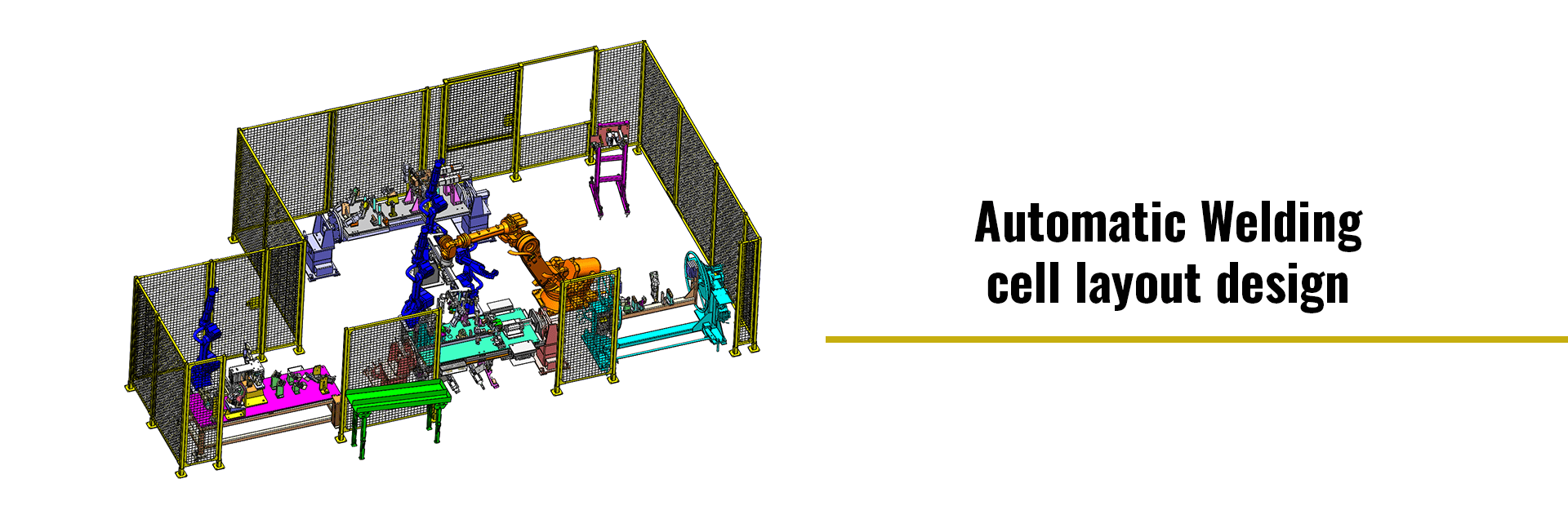
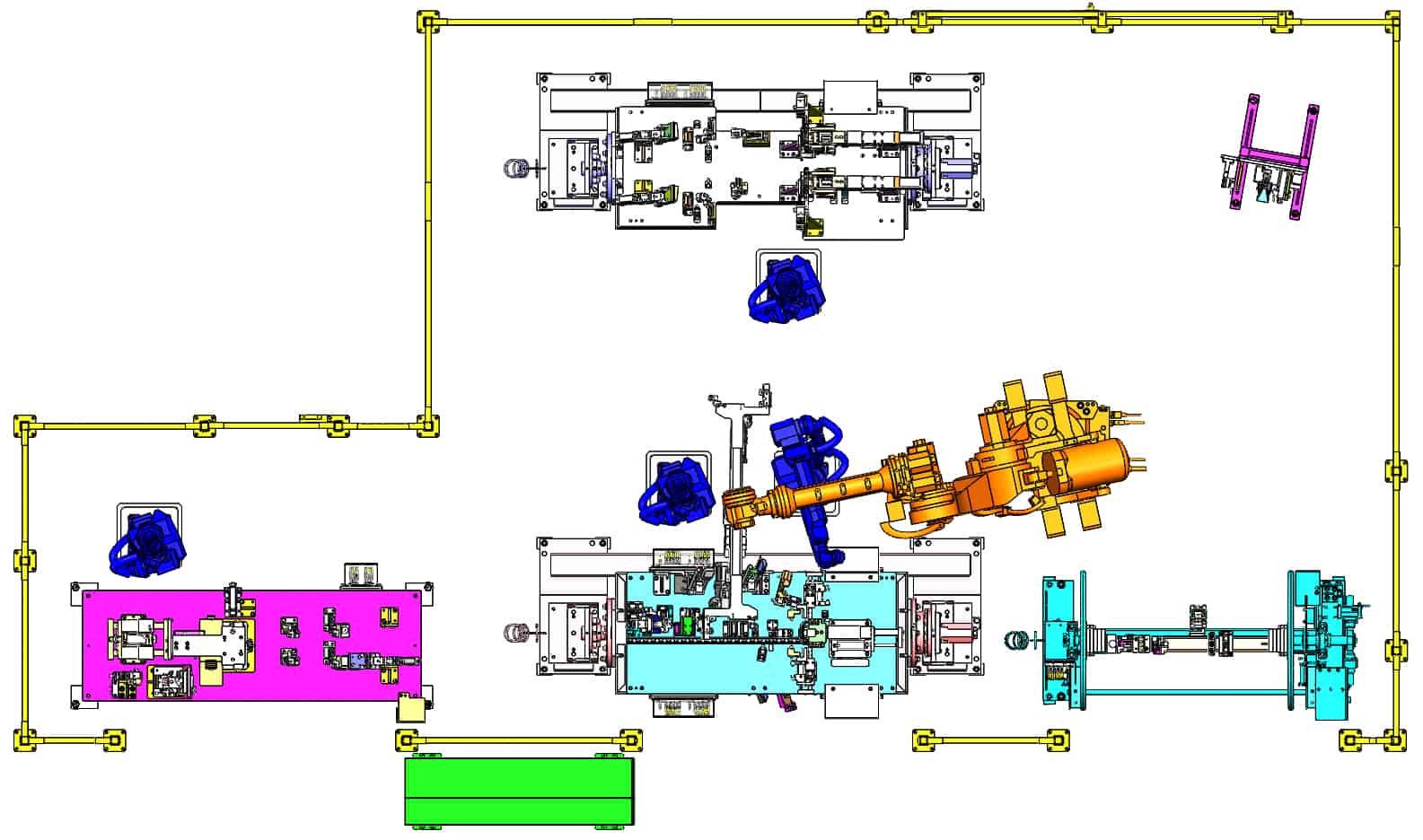
The scope is to design a weld cell layout along with 5 workstations to weld the 6 components of “Front radius Arm”. This project had a very stringent timeline. Since the client’s design engineers were engaged with other projects, they were looking for an external design team to execute this project.
Design Challenges involved:
- The welding cell layout should be able to weld either LH or RH components of “Front Radius Arm” with a common clamp. We designed a clamp such a way that it can be rotated and hold LH and RH components separately as a quick change over design feature.
- Not enough robot arm reach for welding the base plate with arm assembly. So, the fixture was placed on a trunnion to rotate for the required angle to ensure the robot’s reach. The challenge during this design was to ensure that there was no interference between the fixture and the trunnion’s base during the rotation.
Design process :
- Deciding the geo weld and respot weld locations for the components.
- Deciding each station’s function and Sequence of operations to be performed and determine the design elements.
- Designing the Fixture where to hold the component and determining material depending upon the component to be held. Incorporating pins and pneumatic clamps.
- Designing “End of Arm Tool” for pick and place components in and out of fixtures.
- Performing Sizing calculations to select Linear actuator, swing clamps, and power clamps.
- Incorporating safety features such as guarding with light curtains and emergency stop.
- Designing different hole positions and hole sizes for assembly process Poka-Yoke. Having Sensors and Vision Cameras for the assembly checking process as detective Poka-Yoke.
- Considering the ergonomic aspects such as table height, operator reach, etc.
- Using spatter resistance cylinders and also the “Amco18” sheet as spatter proof cover for all the important GD&T surfaces.
- Ensuring the reach and negating any clash during the pick and place of the components using EOAT.
- Checking the reach of the welding robot for all the weld bead locations and the reach of pick and place robot to transfer the components across the stations.
- Optimizing the layout for 5 stations within the provided space considering the robot reach.
- Preparing assembly drawings and Bill of Materials.
Value delivered:
- Have performed sizing calculations of long-lead items such as spatter resistance linear actuators, Clamps, Trunnion, etc., and got the confirmation from the respective manufacturers during the initial stage of design completion. This helped to speed up the construction schedule
- APA Engineering is an “On-Demand Extended Design house” for our client. Design cost was just 40 % when compared to onshore.
If you would like to know more about this topic.