






















Client:
Our customer is an industry pioneer for precision extruded aluminum automotive components and assemblies.
Why APA?
APA has around 8 years of experience in the design of automation equipment, welding fixtures, assembly line automation, work stations/work cells, and EOAT (End Of Arm Tools).
Scope:
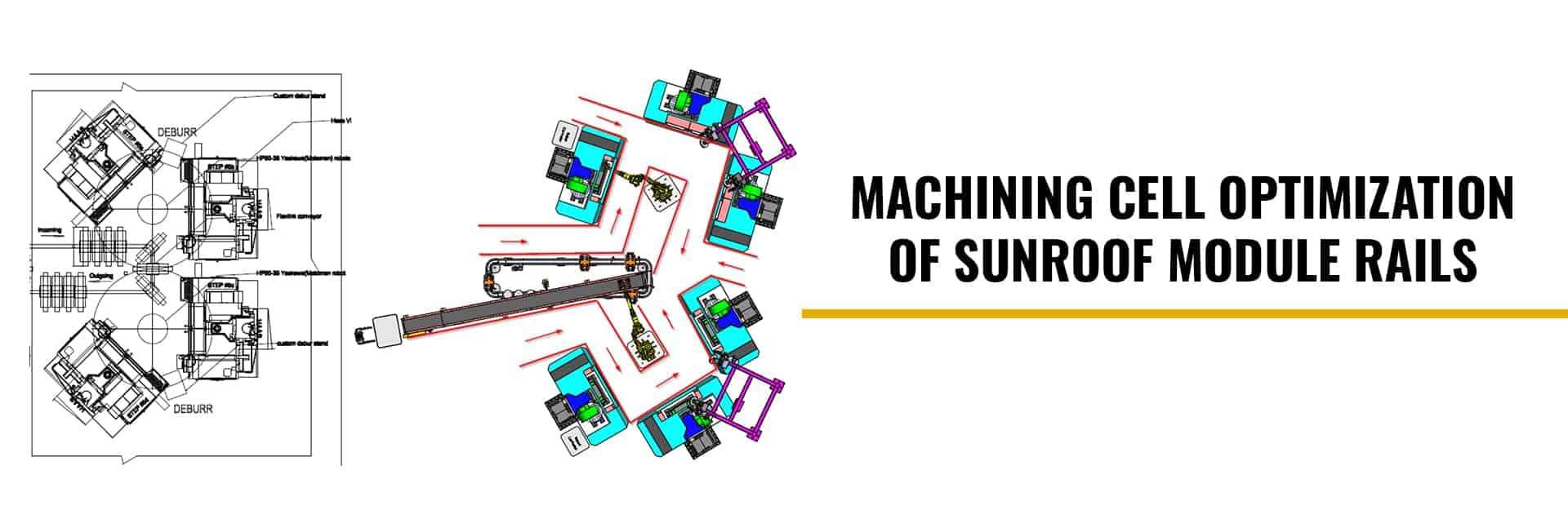
The scope is to increase the productivity by optimizing the machining cell layout of sunroof module rail, reducing the idle time for the robots.
Design Challenges Involved:
- The challenge was to accommodate 6 CNC machines within the robot reach space inside the machining cell which had 4 CNC machines earlier by trying out different orientations.
Design Process:
- Calculating the idle time of the robots by identifying the machining time and the output from the machining cell.
- Accommodating 2 more machines inside the cell within the robot reach space in different orientation.
- Designing the deburr stand with respect the space availability after the 2 machines are included.
- Designing a dual EOAT to reduce the cycle time of the robot by picking the machined part from the machine fixture by one EOAT and placing the raw part in the machine fixture by another EOAT in single movement of the robot.
- Changing the design of conveyor pallet with fail safe pins to avoid the misplacement of LH rail on the RH fixture and vice versa.
- Designing different hole positions and hole sizes for assembly process Poka-Yoke.
- Ensuring the reach and negating any clash during the pick and place of the components using EOAT.
- Checking the reach of the robots for all the CNC machines and conveyor pallets.
- Preparing assembly drawings and Bill of Materials.
Value Delivered:
- The productivity has been increased by 20% by adding 2 more CNC machines inside the machining cell and changed the single EOAT as dual EOAT.
- APA Engineering is an “On-Demand Extended Design house” for our client. Design cost was just 40 % when compared to onshore.
If you would like to know more about this topic.